Qu’est-ce qu’un bus CAN et quel rôle joue-t-il dans les systèmes automobiles ?

Vous êtes entré dans votre automobile, vous avez appuyé sur le bouton de démarrage, et aussi le moteur s’est animé en un rien de temps, mais comment votre automobile a-t-elle décidé si elle devait démarrer ou non ?
Eh bien, pour faire démarrer le véhicule, plusieurs antennes et aussi des unités de contrôle électronique ont communiqué avec la fob cruciale. Le protocole CAN (Controller Area Network) permet de s’assurer que la communication entre la télécommande, les antennes et les unités de contrôle électronique se déroule correctement dans votre véhicule.
Alors, qu’est-ce que la méthode CAN, et comment aide-t-elle exactement les outils des systèmes de votre camion à collaborer ? Eh bien, nous allons l’apprendre.
Qu’est-ce que le protocole CAN, et aussi pourquoi est-il nécessaire ?
À l’époque, les véhicules ne disposaient pas de beaucoup de dispositifs électroniques. En fait, si vous aviez l’intention de démarrer votre voiture au début des années 1900, vous deviez sortir de votre camion ainsi que faire tourner le moteur à la main.
Les automobiles d’aujourd’hui, en fait, ont plusieurs unités de détection électronique, et aussi des dispositifs numériques qui surveillent chaque petite chose, du niveau de température de la cabine aux transformations du vilebrequin.
Cela dit, les données reçues de ces capteurs n’ont aucune valeur tant qu’elles ne sont pas traitées. Ce traitement des données est effectué par des dispositifs de calcul appelés unités de contrôle électronique (ECU).
 Notation du crédit image : SenseiAlan/Flickr
Notation du crédit image : SenseiAlan/Flickr
Contrairement à un système informatique doté d’une seule unité centrale, une automobile possède plusieurs UCE, chacune étant responsable de l’exécution d’une tâche particulière. Bien que ces calculateurs puissent exécuter une seule tâche efficacement, ils doivent collaborer pour garantir le bon fonctionnement de fonctions comme l’ABS ainsi que l’ESC.
C’est pourquoi tous les calculateurs d’une voiture ou d’un camion doivent être reliés. On pourrait utiliser une topologie point à point pour réaliser ces connexions, où chaque calculateur est connecté directement à tous les autres calculateurs. Néanmoins, cette conception rendrait certainement le système compliqué. En fait, une voiture contemporaine possède plus de 70 calculateurs et les relier de façon individuelle augmenterait considérablement le poids du câblage.
Pour résoudre ce problème, Bosch, ainsi que Mercedes-Benz et Intel, ont développé le protocole Controller Area Network en 1986. Cette méthode a permis aux calculateurs d’interagir les uns avec les autres en utilisant un bus d’information commun appelé bus CAN.
Comment fonctionne le CAN ?
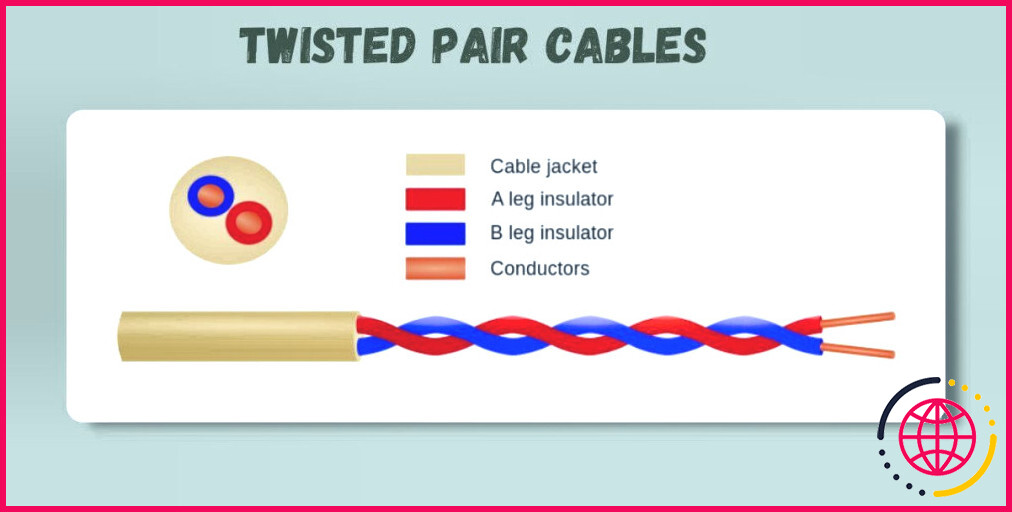
La procédure CAN est une approche de communication basée sur les messages qui s’appuie sur un ensemble de fils torsadés pour la transmission des informations. Ces cordons sont connus sous le nom de CAN haut ainsi que de CAN réduit.
Pour permettre la transmission de données sur ces câbles, leurs degrés de tension sont transformés. Ces changements de niveaux de tension sont après cela convertis en niveaux logiques rendant possible l’interaction entre les calculateurs d’une automobile.
 Crédit image : Spinningspark/Wikimedia
Crédit image : Spinningspark/Wikimedia
Pour transférer le raisonnement un sur le bus CAN, la tension des deux lignes est fixée à 2,5 volts. Cet état est également connu comme l’état récessif, ce qui suggère que le bus CAN est offert à l’utilisation par n’importe quel calculateur.
Au contraire, un 0 logique est envoyé sur le bus CAN lorsque la ligne haute CAN passe à une tension de 3,5 volts et également la ligne réduite CAN passe à 1,5 volt. Cet état du bus est également connu sous le nom d’état de tête, qui indique à chaque calculateur du système qu’un autre calculateur est en train d’émettre, et qu’il doit donc attendre que la transmission soit terminée avant de commencer à envoyer son message.
Pour permettre ces modifications de tension, les calculateurs de la voiture sont reliés au bus CAN par un émetteur-récepteur CAN ainsi qu’un contrôleur CAN. L’émetteur-récepteur est chargé de convertir les niveaux de tension sur le bus CAN en degrés que l’ECU peut reconnaître. Le contrôleur, quant à lui, est utilisé pour gérer les données reçues et s’assurer que les exigences de la méthode sont respectées.
Tous ces calculateurs reliés au bus CAN peuvent envoyer des données sur le câble torsadé, cependant il y a un hic, seul le message avec la plus grande préoccupation possible peut être envoyé sur le bus CAN. Pour comprendre exactement comment une ECU transmet des données sur le bus CAN, nous devons comprendre la structure des messages de la méthode CAN.
Comprendre la structure des messages du protocole CAN
Chaque fois que deux calculateurs souhaitent se connecter, des messages avec la trame ci-dessous sont transférés sur le bus CAN.
Ces messages sont déplacés en transformant les degrés de tension sur le bus CAN, ainsi que le style de jeu torsadé des cordons CAN évite la corruption de l’information tout au long de la transmission.
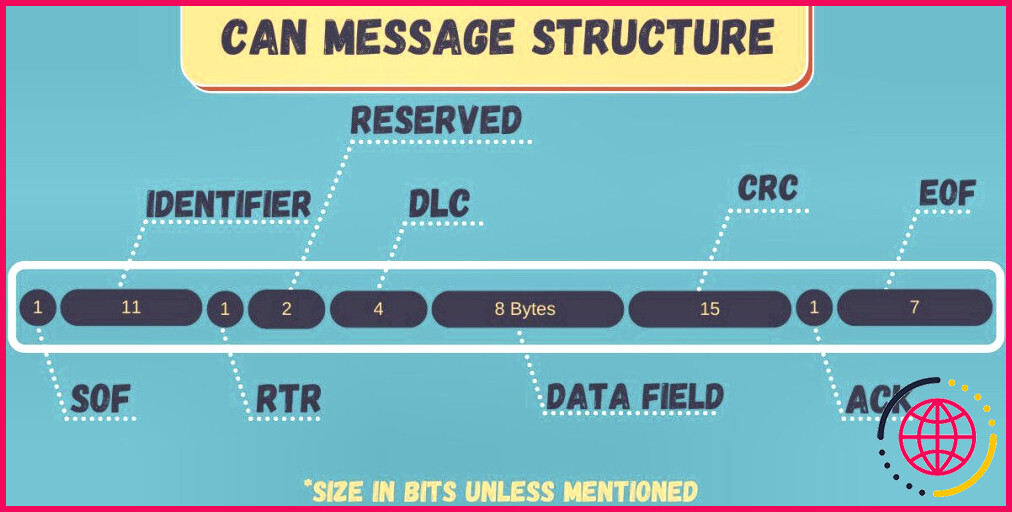
- SOF : Abréviation de Start Of Frame, le petit bit SOF est un cadre d’information à bit dominant solitaire. Ce bit est transmis par un nœud lorsqu’il veut envoyer des données sur le bus CAN.
- Identificateur : L’identifiant sur la méthode CAN peut avoir une dimension de 11 bits ou de 29 bits. La taille de l’identifiant est basée sur la variation de la procédure CAN utilisée. Si la variation étendue de CAN est utilisée, la taille de l’identifiant est de 29 petits bits, et dans d’autres situations, la dimension de l’identifiant est de 11 petits bits. L’objectif principal de l’identifiant est d’identifier la préoccupation du message.
- RTR : La demande de transmission à distance ou la RTR est utilisée par un nœud lorsque des données doivent être demandées à un nœud supplémentaire. Pour ce faire, le nœud qui désire l’information envoie un message avec un petit bit récessif dans le cadre de la RTR au nœud désiré.
- DLC : Le code de taille des données spécifie la taille des données envoyées dans la zone de données.
- Zone de données : Ce champ est constitué du haul de données. La dimension de ce haul est de 8 octets, cependant les méthodes plus récentes comme CAN FD augmentent la taille de cette charge utile à 64 octets.
- CRC : Abréviation de Cyclic Redundancy Check, la zone CRC est un cadre de vérification des erreurs. Elle a une taille de 15 bits et est également calculée à la fois par le récepteur et par l’émetteur. Le nœud de transfert développe un CRC pour les informations qu’il envoie. À la réception de l’information, le récepteur calcule le CRC pour l’information obtenue. Si les deux CRC correspondent, la stabilité des données est vérifiée. Dans le cas contraire, l’information comporte des erreurs.
- Zone d’acquittement : Une fois que l’information a été obtenue et qu’elle est exempte d’erreurs, le nœud récepteur introduit un petit bit de tête dans le cadre d’accusé de réception et le renvoie à l’émetteur. Cela informe l’émetteur que l’information a été obtenue et qu’elle est également exempte d’erreurs.
- Fin de la trame : Une fois que la transmission des données est terminée, sept bits récessifs consécutifs sont transmis. Cela permet de s’assurer que tous les nœuds comprennent qu’un nœud a effectivement terminé la transmission d’informations, ainsi qu’ils peuvent envoyer des informations sur le bus.
En plus des petits bits ci-dessus, le protocole CAN a un couple de bits prévus pour une utilisation future.
Simplifier le CAN par un exemple
Maintenant que nous avons une compréhension fondamentale de ce à quoi ressemble un message sur le bus CAN, nous pouvons comprendre exactement comment les données sont envoyées entre les différents calculateurs.
Pour simplifier, disons que notre automobile possède 3 calculateurs : Nœud 1, Nœud 2, et Nœud 3. Sur ces 3 UCE, le nœud 1 et le nœud 2 veulent communiquer avec le nœud 3.
Voyons comment la méthode CAN permet de rendre la communication certaine dans une telle situation.
- Détection de l’état du bus : Tous les calculateurs du véhicule sont reliés au bus CAN. Dans notre exemple, le nœud 1 ainsi que le nœud 2 souhaitent envoyer des informations à un calculateur supplémentaire ; avant cela, les deux calculateurs doivent examiner l’état du bus CAN. Si le bus reste dans un état dominant, les calculateurs ne peuvent pas transmettre de données car le bus reste en service. En revanche, si le bus reste dans un état récessif, les ECU’ peuvent transmettre des informations.
- Envoi du début de trame : Si la tension différentielle du bus CAN est absolument nulle, le nœud 1 ainsi que le nœud 2 changent l’état du bus en état récessif. Pour ce faire, la tension de CAN high est augmentée à 3,5 volts, et la tension de CAN reduced est diminuée à 1,5 volt.
- Décider quel nœud peut accéder au bus : Une fois que le SOF est envoyé, les deux nœuds se disputent l’accès au bus CAN. Le bus CAN utilise la méthode CSMA/CD (Carrier Sense Multiple Access/Collision Detection) pour déterminer quel nœud obtient l’accès. Cette méthode compare les identifiants transmis par les deux nœuds ainsi qu’admet celui qui est le plus concerné.
- Envoi d’informations : Une fois que le nœud a accès au bus, la zone d’information, en plus du CRC, est envoyée au récepteur.
- Vérification et aussi fin de la communication : A l’obtention de l’information, le nœud 3 vérifie le CRC de l’information obtenue. S’il n’y a pas d’erreurs, le nœud 3 envoie un message CAN au nœud de transfert avec un bit dominant sur la structure d’acquittement en plus de l’EOF pour terminer la communication.
Les différents types de CAN
Bien que la structure de message utilisée par le protocole CAN reste la même, la vitesse de transmission des données ainsi que la dimension des petits bits d’information sont transformées pour déplacer de plus grands transferts de données.
En raison de ces différences, le protocole CAN a différentes variations, et aussi une revue de la même est donnée ci-dessous :
- CAN à haute vitesse : Les informations sur les cordons CAN sont envoyées en série, et aussi cette transmission peut se faire à différents prix. Pour le CAN haute vitesse, ce débit est de 1 Mbps. En raison de cette vitesse élevée de transmission des informations, le CAN haut débit est utilisé pour les calculateurs, qui gèrent le groupe motopropulseur ainsi que les systèmes de sécurité et de sûreté.
- CAN basse vitesse : Dans le cas du CAN basse vitesse, le débit de transmission de l’information est abaissé à 125 kbps. Comme le bas débit peut fournir des taux d’information, il est utilisé pour attacher les calculateurs qui gèrent la commodité du voyageur, comme la climatisation ou le système d’info-divertissement.
- Peut FD : Abréviation de CAN adaptable data rate, CAN FD est la dernière variation de la procédure CAN. Elle porte la dimension du cadre de données à 64 octets et permet également aux calculateurs d’envoyer des données à des vitesses variant de 1 Mbps à 8 Mbps. Cette vitesse de transmission des données peut être gérée par les calculateurs en temps réel en fonction des demandes du système, ce qui permet de déplacer les données à des vitesses plus élevées.
Quel est l’avenir de la communication automobile ?
La procédure CAN permet à un certain nombre de calculateurs de se connecter les uns aux autres. Cette interaction rend possible les attributs de sécurité comme le contrôle électronique de la stabilité et aussi les systèmes avancés d’aide au conducteur comme la découverte des angles morts et le régulateur de vitesse adaptatif.
Cela dit, avec l’arrivée de fonctions sophistiquées comme la conduite autonome, la quantité de données envoyées par le bus CAN augmente énormément. Pour permettre ces attributs, des versions plus récentes de la méthode CAN, comme la CAN FD, arrivent sur le marché.
Pourquoi le bus CAN est-il utilisé dans l’automobile ?
Qu’est-ce que le protocole de bus CAN ? Le Controller Area Network – CAN bus est un protocole basé sur des messages conçu pour permettre aux unités de contrôle électronique (ECU) présentes dans les automobiles d’aujourd’hui, ainsi qu’à d’autres appareils, de communiquer entre elles de manière fiable et prioritaire.
Qu’est-ce que le bus CAN et comment ça marche ?
Le bus CAN est un bus de communication série, conçu pour des performances robustes dans des environnements difficiles, principalement dans les applications industrielles et automobiles. Il s’agit essentiellement d’une norme de bus de véhicule qui permet aux microcontrôleurs et aux appareils de communiquer entre eux.
Pourquoi le CAN est-il utilisé dans l’automobile ?
CAN est l’abréviation de Controller Area Network. Ils sont spécialement conçus pour répondre aux besoins de l’industrie automobile. Avant l’introduction de CAN, chaque appareil électronique était connecté à d’autres appareils à l’aide de nombreux fils pour permettre la communication.
Que signifie CAN dans l’automobile ?
Historique CAN. Bosch a initialement développé le Controller Area Network (CAN) en 1985 pour les réseaux embarqués. Dans le passé, les constructeurs automobiles connectaient les appareils électroniques des véhicules à l’aide de systèmes de câblage point à point.