Qu’est-ce que pdu dans autosar ?
La couche PDU est la deuxième couche de l’architecture logicielle AUTOSAR. Il définit les interfaces entre les différents composants logiciels d’un système AUTOSAR. La couche PDU fournit une interface de communication uniforme pour tous les composants logiciels d’un système AUTOSAR. Cette interface est basée sur les normes CAN (Controller Area Network) et permet la communication entre les différents ECU (Electronic Control Units) d’un véhicule. La couche PDU définit également le format des données échangées entre les différents composants logiciels.
PDU est l’abréviation de Protocol Data Unit. Il contient SDU et PCI. Chaque PDU a un ID PDU statique qui est utilisé pour identifier les PDU. [14]. Lors de la transmission du PDU, la couche supérieure envoie son PDU à la couche inférieure, qui interprète ce PDU comme le SDU de son propre PDU.
Qu’est-ce que le routeur de PDU dans AUTOSAR ?
Le module PDU Router fournit des services d’acheminement des I-PDU (couche d’interaction. Unités de données de protocole) entre les modules suivants : – modules d’interface de communication (par exemple, LINIF, CANIF et FlexRayIf) – modules de protocole de transport (par exemple, CAN TP, FlexRay TP) – gestionnaire de communication de diagnostic (DCM) d’AUTOSAR et transport.
Quelle est l’utilisation de PDU dans AUTOSAR ?
1 Introduction et aperçu fonctionnel
Le routeur PDU détermine la destination d’une PDU en utilisant l’ID PDU et une table de configuration statique. Les I-PDU (Interaction Layer Protocol Data Units) sont utilisés pour l’échange de données des modules situés directement au-dessus du PDU Router, par exemple AUTOSAR COM et AUTOSAR DCM.
Qu’est-ce qu’un PDU en boîte ?
La version 4.2. 1 a introduit un mappage dynamique multi-PDU-to-Frame (PDU : Protocol Data Unit). Principalement, cela permet une migration facile des architectures existantes vers CAN FD avec un débit de données plus élevé (par exemple, l’emballage de plusieurs trames CAN classiques dans une trame CAN FD).
Qu’est-ce que le PDU dans le diagnostic ?
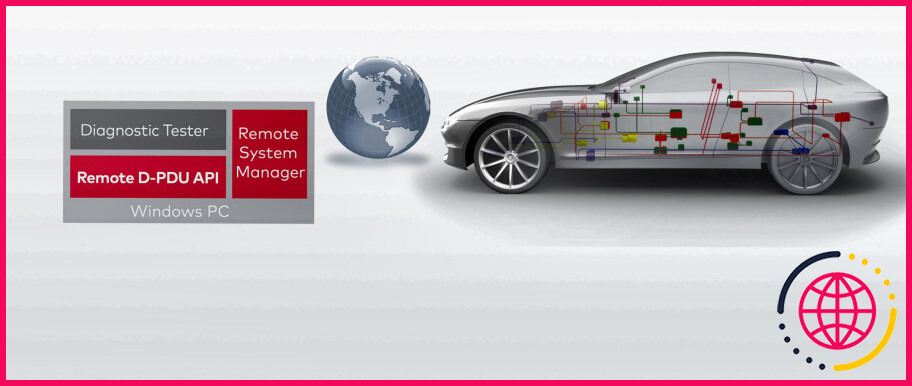
L’API Vector D-PDU est une interface de programmation, normalisée dans la norme ISO 22900-2, permettant d’accéder à une interface de communication véhicule (VCI). L’API D-PDU est spécialement conçue pour le diagnostic et les applications flash de toute nature.
Qu’est-ce que le PCI en autosar ?
Un PCI contient essentiellement les informations de source et de destination de la PDU à échanger entre les couches et les modules. Une PDU est emballée dans une structure (SDU + PCI) au niveau de la couche COM et est transmise à la couche inférieure dans la pile de communication.
L’autosar peut-il être la couche transport ?
Le protocole de transport est surtout utilisé pour la communication de pair à pair dans CAN. Passons en revue les fonctions de base du protocole de la couche réseau telles que spécifiées par la norme ISO 15765-2. Le protocole de la couche réseau effectue la transmission/réception de données jusqu’à 4095 octets et le rapport de l’achèvement de la transmission/réception.
Qu’est-ce que le format PDU ?
Le mode PDU propose d’envoyer des informations binaires au format 7 bits ou 8 bits. Les messages de 8 bits (140 caractères maximum) ne sont généralement pas visualisables par les téléphones comme des messages texte ; ils sont plutôt utilisés pour les données dans, par exemple, la messagerie intelligente (images et sonneries) et le provisionnement OTA des paramètres WAP.
Que signifie autosar ?
L’architecture de système ouvert automobile (AUTOSAR) est une architecture logicielle automobile ouverte et normalisée, qui prend en charge la normalisation des interfaces entre le logiciel d’application et les fonctions de base du véhicule et qui aide à établir une architecture logicielle de calculateur commune pour tous les membres d’AUTOSAR.
Quelle est la différence entre J1939 et CAN ?
1 Réponse. Il n’y a pas de différence entre CAN et J1939. J1939 construit sur le dessus de CAN 2.0b. Quand un certain dispositif envoie un grand message en utilisant le protocole de transfert J1939 (J1939.TP) en utilisant BAM les autres dispositifs peuvent accepter ce message ou l’ignorer.
Quelle est la tâche de la couche MCAL ?
MCAL est un module logiciel qui accède directement aux modules périphériques de la MCU sur puce et aux périphériques externes qui sont mappés en mémoire, et rend la couche logicielle supérieure indépendante de la MCU.
Quel module effectue le démarrage/arrêt des groupes I PDU ?
Les groupes I-PDU sont arrêtés par défaut. AUTOSAR COM fournit des routines pour le démarrage et l’arrêt des I-PDUs.
Qu’est-ce que la configuration des UCE ?
Explications complémentaires : La configuration d’une UCE désigne l’activité au cours de laquelle le logiciel d’une UCE est configuré pour une utilisation spécifique à l’intérieur de l’UCE. Il s’agit de la configuration complète du logiciel de base et du RTE d’un seul calculateur.
Qu’est-ce que le BSW d’AUTOSAR ?
AUTOSAR, ou AUTomotive Open System Architecture, est une norme visant à uniformiser les systèmes de contrôle automobile dans toute l’industrie. Les normes AUTOSAR définissent une couche logicielle de base (BSW) qui comprend des services qui s’interfacent avec un matériel spécifique mais qui ont une interface commune avec l’application.
Configuration des pilotes de canettes ?
Le CanConfigSet contient les configurations des contrôleurs CAN et des objets matériels CAN. CanControllerId est mappé à un contrôleur et dans MPC cela signifie que 0=FLEXCAN_A, 1=FLEXCAN_B etc. 16 fois 500000 est 8000000, sélectionner 16 quantas de temps par bit. Sélectionnez le point d’échantillonnage 75%.
Qui utilise AUTOSAR ?
Pour ceux qui ne le savent pas, AUTomotive Open System ARchitecture (AUTOSAR) est un partenariat mondial de développement automobile. Ce logiciel est devenu de plus en plus populaire au cours de la dernière décennie et est utilisé par de nombreuses grandes entreprises de construction automobile.
RTE peut-il AUTOSAR ?
Environnement d’exécution (RTE) : agit comme un intergiciel entre la couche d’application AUTOSAR et les couches inférieures. Fondamentalement, la couche RTE gère la communication inter- et intra-ECU entre les composants de la couche application ainsi qu’entre le BSW et la couche application.
AUTOSAR est-il un RTOS ?
eMCOS AUTOSAR est le profil conforme à la plate-forme classique AUTOSAR pour eMCOS, un système d’exploitation en temps réel (RTOS) qui a été le premier produit de ce type disponible sur le marché à offrir un support évolutif qui s’étend des processeurs à un seul cœur aux processeurs à plusieurs cœurs.
Qu’est-ce qu’un message PDU ?
(PDU signifie Protocol Data Unit.) Le mode dans lequel fonctionne un modem GSM/GPRS ou un téléphone mobile détermine la syntaxe de certaines commandes SMS AT et le format des réponses renvoyées après exécution. Voici les commandes AT SMS concernées : +CMGS (Envoyer un message)
Comment puis-je envoyer un SMS PDU ?
Tout d’abord, pour envoyer des sms lorsque le modem est en mode pdu, vous devez envoyer ces commandes : AT+CMGS=
Comment sont appelées les PDUs à chaque couche ?
PDU est un terme significatif lié aux quatre couches initiales du modèle OSI. Dans la couche 1, PDU est un bit, dans la couche 2 c’est une trame, dans la couche 3 c’est un paquet et dans la couche 4 c’est un segment. Dans la couche 5 et les couches supérieures, le PDU est appelé données.
CAN si autosar ?
Interface CAN : L’interface CAN (CANIF) est un module de la couche d’abstraction du calculateur, qui est responsable de services tels que la demande de transmission, la confirmation de transmission, l’indication de réception, le contrôle du mode contrôleur et le contrôle du mode PDU.
Taille du bloc CAN TP ?
Il peut transporter jusqu’à 4095 octets de charge utile par paquet de messages. Dans le modèle OSI, ISO-TP couvre la couche 3 (couche réseau) et 4 (couche transport).
ISO-TP PEUT-IL UDS ?
ISO-TP a été conçu pour être utilisé pour l’UDS. Le protocole actuel ISO-15765 se compose de 4 parties. La partie ISO-15765-2 indique comment transmettre les grandes trames et la partie ISO-15765-3 définit comment mapper les champs ISO-TP sur un message UDS.
Qu’est-ce qu’un IPDU et un NPDU ?
Abréviation de protocol data unit, PDU est une information délivrée par une couche réseau. NPDU – Communication pour la couche réseau. TPDU – Communication pour la couche transport.