Qu’est-ce que la vision industrielle et quelle est son importance pour les voitures autonomes ?

Principaux enseignements
- Les voitures autonomes s’appuient sur la technologie de vision industrielle pour voir et comprendre leur environnement, ce qui leur permet de détecter les objets, d’identifier les panneaux de signalisation et de naviguer sur la route.
- La vision industrielle dans les voitures auto-conduites se compose d’un système de caméra, d’un système informatique de pointe et d’algorithmes d’intelligence artificielle, qui travaillent ensemble pour recueillir des informations visuelles, les traiter en temps réel et identifier des modèles et des objets.
- La vision artificielle est cruciale pour parvenir à une autonomie totale dans les voitures autonomes, car elle permet la classification des objets, la détection des voies et des signaux, l’identification des panneaux de signalisation et la reconnaissance du trafic. L’avenir des véhicules autonomes réside dans les progrès de l’IA, de l’informatique de pointe et de la technologie des caméras.
Les voitures auto-conduites ont toujours suscité l’attention. Même si nous ne disposons pas encore de voitures totalement autonomes, nous avons des voitures équipées de systèmes avancés d’aide à la conduite (ADAS) capables de diriger automatiquement le véhicule, de changer de voie, de se garer et de réguler la vitesse en fonction du trafic.
Une voiture autonome utilise de nombreux capteurs pour ses ADAS, la vision industrielle étant le principal moyen de détecter, d’identifier et de calculer la distance des objets et de l’environnement général. Sans vision artificielle, il est très peu probable que les voitures auto-conduites soient dotées d’un régulateur de vitesse et d’un pilote automatique.
Qu’est-ce que la vision industrielle ?

La vision industrielle est une technologie qui permet aux machines de voir et de reconnaître des objets dans leur environnement. Il s’agit d’un sous-ensemble de la vision par ordinateur qui se concentre sur les applications industrielles de la détection d’objets orientée vers la vision dans les machines autonomes telles que les robots et les véhicules.
La vision artificielle utilise aujourd’hui des algorithmes d’apprentissage profond de l’IA tels que les réseaux neuronaux convolutifs (CNN) pour créer des modèles robustes et bien généralisés capables d’identifier avec précision des objets dans diverses conditions. Cela permet de mettre en œuvre la vision artificielle sur diverses tâches nécessitant une plus grande fiabilité dans la fabrication, l’agriculture, la robotique et l’automobile.
Comment la vision industrielle fonctionne-t-elle dans les voitures autopilotées ?
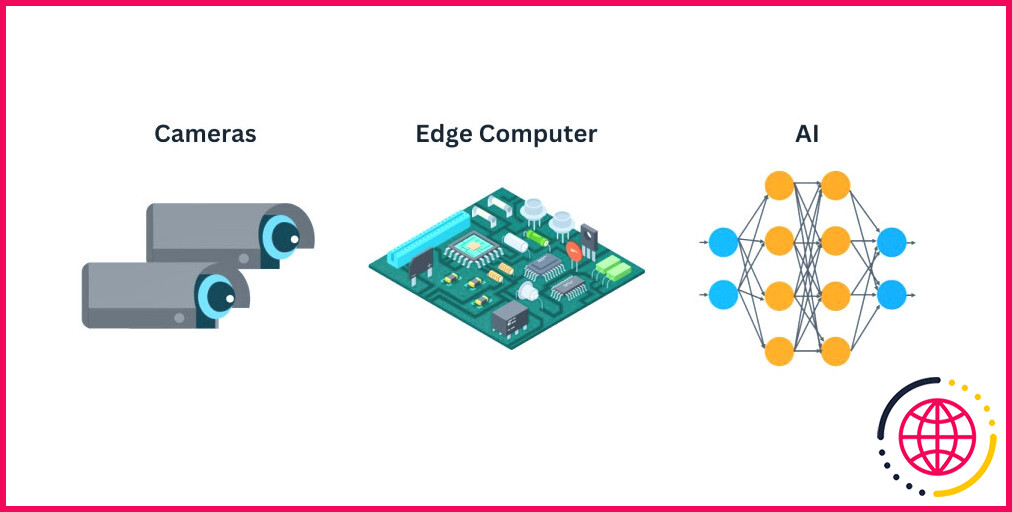
La vision industrielle dans les voitures autonomes peut généralement être divisée en trois parties : le système de caméra, le traitement (edge computing) et l’IA. Cette pile technologique permet à un véhicule autonome de voir, de penser et d’identifier les signes et les obstacles pendant la conduite. Examinons chaque partie en profondeur pour comprendre comment ces technologies s’articulent pour former la vision artificielle d’une voiture autonome.
Système de caméra
La vision industrielle s’appuie sur des systèmes de caméras pour recueillir des informations visuelles sur l’environnement. Les voitures auto-conduites utilisent plusieurs caméras installées autour de la voiture pour recueillir autant d’informations visuelles que possible.
Deux principaux capteurs sont utilisés dans les caméras de vision industrielle : les semi-conducteurs à oxyde métallique complémentaire (CMOS) et les dispositifs à couplage de charge (CCD). Pour les voitures autonomes, le CMOS est souvent préféré en raison de sa vitesse de lecture rapide, de sa puissante électronique embarquée et de ses capacités de traitement parallèle, ce qui en fait le capteur le plus rapide, bien que sujet au bruit ou aux artefacts. Des solutions, telles que différents modes d’éclairage, la vision nocturne numérique et les filtres, peuvent aider le capteur CMOS lorsque les conditions d’éclairage ne sont pas idéales.
Pour les voitures auto-conduites, les caméras sont installées à certaines distances les unes des autres afin de produire une vision stéréoscopique. La vision stéréoscopique est la capacité de combiner deux ou plusieurs entrées visuelles, créant un sentiment de profondeur ou de tridimensionnalité des objets et de l’environnement. Cela permet aux voitures de trianguler et de calculer la distance approximative entre l’objet et la voiture.
Comme les humains ont deux yeux, nous bénéficions également d’une vision stéréoscopique. Vous pouvez le tester vous-même : fermez un œil et choisissez un petit objet sur votre bureau. Placez votre main sur le côté de l’objet et assurez-vous que la pointe de l’objet se trouve à une distance d’au moins cinq centimètres. Essayez de faire une pause de quelques secondes et voyez si vous êtes sûr de votre approximation. Maintenant, essayez d’ouvrir les deux yeux et constatez que votre perception de la profondeur est bien meilleure.
Ordinateur de bord
Pendant que le système de caméra de la voiture autonome recueille des données, un ordinateur embarqué (processeur de bord) traite toutes les entrées en temps réel afin d’informer immédiatement le système de l’état de l’environnement. Bien que les tâches typiques de vision industrielle puissent économiser de l’argent en utilisant l’informatique en nuage, il y a tout simplement trop de risques pour que les voitures auto-conduites soient connectées à l’informatique en nuage, même s’il s’agit d’externaliser le processus dans ses exigences de vision industrielle.
L’utilisation d’un ordinateur périphérique pour le traitement des données d’entrée élimine les problèmes de latence et garantit que les données sont reçues, traitées et communiquées en temps réel. Les ordinateurs de bord pour les voitures auto-conduites utilisent des ordinateurs spécialisés intégrant des processeurs graphiques d’IA tels que Tensor Core et CUDA Cores de NVIDIA.
Algorithmes d’IA
Les algorithmes ont toujours été un élément crucial de la vision industrielle. L’algorithme est ce qui permet à un ordinateur d’identifier tous les motifs, formes et couleurs fournis par le système de caméra. L’utilisation de l’IA par rapport aux algorithmes de vision artificielle plus traditionnels améliore considérablement la capacité d’une voiture autonome à identifier de manière fiable les objets, les panneaux de signalisation, le marquage au sol et les feux de circulation. De nombreux algorithmes d’IA sont utilisés pour former les voitures autonomes. Les plus populaires sont les suivants :
- YOLO (You Only Look Once) : Un algorithme de détection d’objets en temps réel qui identifie et suit les objets dans le champ de vision de la voiture.
- SIFT (Scale-Icar’sant Feature Transform) : Utilisé pour l’extraction de caractéristiques, il aide la voiture à reconnaître des points de repère et des objets distinctifs dans son environnement.
- Histogramme des gradients orientés (HOG) : Utilisé pour la reconnaissance d’objets, il se concentre sur l’extraction de motifs locaux et de gradients à partir d’images.
- TextonBoost : Un algorithme qui aide à la reconnaissance d’objets en analysant les textures dans l’environnement.
- AdaBoost : Employé pour la classification des données, AdaBoost combine plusieurs classificateurs faibles pour prendre des décisions fortes concernant les objets et les obstacles sur le chemin du véhicule.
L’importance de la vision artificielle dans les voitures autopilotées
 Crédit photo : Automobile Italia/Flickr
Crédit photo : Automobile Italia/Flickr
La vision industrielle est le principal moyen pour une voiture autonome de détecter et de comprendre son environnement. Sans vision industrielle, il est très probable que les voitures autonomes soient repoussées au niveau 1 sur l’échelle de l’autonomie des véhicules et qu’elles n’atteignent jamais l’autonomie complète.
Grâce à la vision artificielle, les voitures autonomes sont désormais capables de classer les objets, de détecter les voies et les signaux, d’identifier les panneaux de signalisation et de reconnaître le trafic.
Bien que de nombreux véhicules à conduite autonome utilisent aujourd’hui divers capteurs, tels que le LIDAR, le RADAR et le SONAR, tous s’appuient fortement sur la vision artificielle pour voir l’environnement, identifier les objets et comprendre la signification des panneaux et des feux de signalisation sur la route. Tous ces capteurs supplémentaires ne servent qu’à améliorer la vision artificielle et à renforcer la sécurité des personnes, des animaux et des biens.
Cela dit, la vision artificielle peut fonctionner de manière autonome sans l’aide d’autres capteurs pour fournir des capacités de pilotage automatique. En fait, les dernières voitures autopilotées de Tesla ont abandonné le RADAR et s’appuient désormais uniquement sur la vision artificielle pour leur système Autopilot.
Bien que cela ne signifie rien en termes de discrédit de l’utilité des autres technologies de capteurs, cela montre l’importance et la puissance de la vision industrielle dans les voitures autopilotées.
L’avenir de la vision industrielle dans les véhicules autonomes
La vision industrielle est le fondement des voitures autonomes. Grâce à la vision industrielle, les voitures peuvent voir et percevoir l’environnement exactement comme le font les humains. Bien que des défis persistent, les avantages de la vision industrielle en termes de sécurité et de navigation ne peuvent être sous-estimés. En ce qui concerne l’avenir des véhicules autonomes, toute nouvelle avancée dans les domaines de l’IA, de l’informatique de pointe et/ou de la technologie des caméras rendra certainement les voitures autonomes plus performantes, ce qui les fera probablement passer à un niveau d’automatisation plus élevé.